Challenges in developing autonomous vehicles
The starting point of the vehicle development process is occupant safety. Shifting responsibility from driver to carmaker to prevent accidents has a major impact on the development process. Carmakers will have to prove the thoroughness of their development processes when people get injured or killed by wrong maneuvers from autonomously driven vehicles.
This implies automated driving systems will have to react in a safe manner to all possible traffic scenarios under any possible weather and road conditions. The technology enabling this is complex. It requires an integrated system of systems, with mechanical, electrical and software components. For an optimized design, these components cannot be treated as separate artifacts. Software and hardware need to be developed in sync to achieve required hardware costs and system performance.
A key variable in automated driving systems is sensor configuration. New sensors are being introduced at a rapid pace and more advanced sensor fusion algorithms are being developed. There is an infinite number of possible compositions to generate a 360-degree image of the environment around the vehicle, supported by different sensor types, quantities and positions on the vehicle. Sensors are typically a significant cost factor in vehicles, making configuration selection a potential market differentiator.
Potentially the biggest challenge, however, is the confidence the vehicle will perform to its specifications. Not only during the development stages, but in real traffic with occupants and for many years. This requires a validation and verification process that allows for performance testing in a large number of circumstances. The process should be able to be repeated for different car evolutions over time, allowing performance comparisons for design exploration purposes.
Finally, design decisions and verification results during the vehicle development process need to be traceable. To optimize the vehicle development process, supporting integrated hardware and software development with instant optimization capabilities for sensor configurations and with a highly automated and repeatable validation and verification process is necessary. It is only scalable for mass production if the requirements, the system and simulation architectures, the models and the performance validation results are managed carefully. This would make it possible to continuously improve the product, respond to liability claims and limit redundant work by maximizing re-use of digital data.
System-driven product design exploration and verification
In order to cope with the previously mentioned challenges, Siemens PLM Software proposes a system-driven product development process using a digital twin of the product and its components under the umbrellas of Simcenter™ software, Team center ® software and 3 Mentor solutions. When it comes to automated driving functions, seven key elements comprise the digital product representation:.
The ability to model all of these items enables a scalable design exploration, validation and verification process. It makes the process flexible, accommodating the new required vehicle development standards. By having the digital engineering environment embedded in a product lifecycle management (PLM) enterprise framework, the automotive industry leads several other industries in this paradigm shift because it can support design integrity and functional safety and security standards.
System on chip
The time when automotive electronic control units (ECUs) are off-the-shelf components is about to end. The high compute loads and stringent requirements for low-energy consumption, combined with the specific environmental conditions, make it inevitable that specific chips will be developed for autonomous driving applications. This drives the need for the automotive industry to work much closer with the chip makers and have parallel product development processes with multiple interdependencies.
Long development cycles and the high cost of chip wafers put a stress on this relationship. However,
Mentor, a Siemens business, supports the chip development process with virtual and emulated representations of early stage chip design. This enables integrated design exploration and early stage validation and verification of future system performances with realistic compute performances. Furthermore, Mentor simulation solutions can be used to optimize the thermal and durability performance of chips and systems. System on chip Product Innovation Platform AD compute platform Multi-domain data orchestration Embedded software Algorithms Sensor and environment System integration Vehicle and occupant Continuous verification and validation framework Start integrated – Stay integrated
AD compute platform
The autonomous platform covers the control system hardware configuration. The system boundaries are the sensors on the vehicle and the actuator outputs at the vehicle’s communication bus. It is a complex assembly of electronics and wiring that requires optimized calculation time, energy consumption, thermal performance, electromagnetic capability (EMC) and multiple other attributes. Functionally, the autonomous platform translates an environment with all kind of actors into electric signals at the system outputs that make the car follow the anticipated trajectory.
Although currently automated driving solutions like adaptive cruise control, lane keeping assist and automated parking systems are typically delivered as a combined product of sensors and processors, there is a strong expectation the car of the future will have a centralized architecture for a combined array of functions. A set of sensors around the vehicle will be used to build a 360-degree representation of the environment of the vehicle that can be used for all automated driving functions. A central processor unit will run sensor fusion algorithms on raw sensor data and generate an object list of the vehicle’s surroundings.
Embedded software
Software is an integral aspect of any automated driving system, and it is quickly becoming a dominating factor in the product development process. The challenges with software development are well identified: increasing platform complexity, data synchronicity, requirement traceability, variant management and integration activities.
Engineers typically work with isolated tools and adapt their engineering process to the available tools. Tool integration is achieved by demanddriven, pragmatic and ad hoc composed chains of existing tools. Nevertheless, these tool chains are not (and cannot be) seamless since the integration that can be achieved is not deep enough. This hampers the reuse and refinement of models, which subsequently leads to problems like redundancy, inconsistency and a lack of automation. The result is that interaction among teams is often sluggish. Blurred lines of communication make development and integration activities difficult to manage, and complex and customized software products are hard to create on time and within budget. These deficiencies decrease the productivity and quality that could be provided by model-based approaches.
Siemens PLM Software has developed Simcenter Embedded Software Designer to bring out a unified and integrated model driven software development environment to manage all the engineering artifacts for efficient model-based, test-driven development of on-board software. Simcenter Embedded Software Designer provides integrated variant rich modeling, coding, testing and verification features, which take advantage of the persistency and associativity of the enriched architecture model. It is an open platform, rather than a closed tool, which allows users to freely extend and customize both the tool functionalities and the underlying languages.
Algorithms
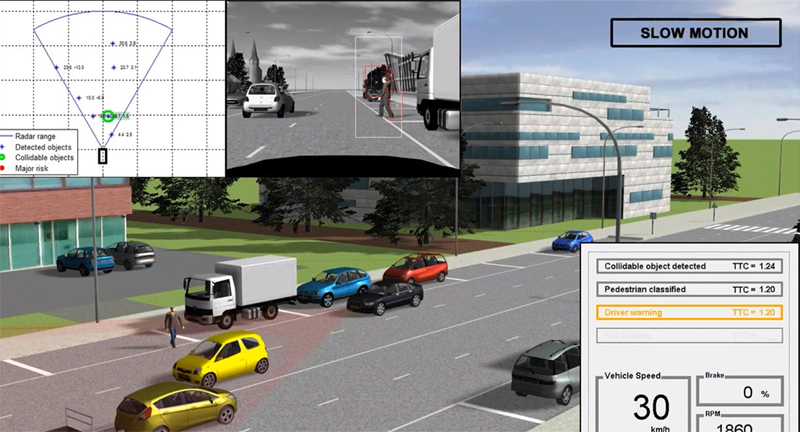
Controls form the decision-making intelligence of the vehicle. The controls contain the algorithms that automate the driving functions by interpreting the environmental image that the sensor fusion system has developed, combined with the vehicle’s current and anticipated state. Trajectory planning is a significant part of the challenge. Based on the inputs the controller receives, it needs to determine the free space where it can drive and choose the route to its final destination. Siemens PLM Software engineering services teams support control algorithm development by bringing experience and expertise in the domains of model predictive control, machine learning and deep learning.
Sensors and environment
As described earlier, the sensors required for automated driving functions multiply quickly. The number of sensors per vehicle as well as the variety of sensor types available to the automotive industry increase. This is amplified by the trend towards centralized sensor fusion architectures. Tier 1 suppliers combine the sensor and processor and offer them as systems to automotive original equipment manufacturers (OEMs). With OEMs assuming the system integration role, the barrier to entry in this market for sensor-only suppliers is lowered drastically, increasing access to different sensor technology for OEMs.
Reducing sensor cost is a primary goal since sensors form a major part of automated driving system hardware. LIDAR technology, in particular, is still so expensive that it has not yet been introduced in standard and lower segment vehicles. It is hoped that initiatives for solid-state, lower-cost LIDAR solutions will be mass produced in the future.
For the automotive industry, it is imperative to react quickly to new sensor technology. It is critical to assess sensor configurations and quantify the value of replacing sensors in today’s systems with the technology of tomorrow.
Simcenter solutions enable users to model sensors at all fidelity levels, from basic ground truth sensor models for control algorithm development support to 6 high-frequency electromagnetic radar models and physics-based camera models for sensor technology development. Thermal analyses tools are also available to engineers to support sensor design and sensor integration in the vehicle.
Vehicle and occupants
Having modeled what was referred to as the control system level (from sensor input to actuator output), the next element in the performance of the autonomous driving car is full vehicle performance, and with that occupant safety. Simcenter includes the highest fidelity level solutions for vehicle behavioral simulation and occupant modeling.
Starting with vehicle simulation, Simcenter differentiates in 0D/1D and 3D simulation. Simcenter Amesim is the simulation environment for 0D/1D functional modeling and is the benchmark in powertrain and chassis system simulation. With a large library of standard models for all relevant vehicle systems, it enables you to compose full vehicle configurations with optimum fidelity for each area. Although an urban scenario might require models with the highest level of detail for the electric powertrain to get an accurate understanding of the energy efficiency of the autonomous driving car, there is little value in a highway scenario. To validate braking performance for an unexpected event, accurate chassis models are essential to take into account issues such as the different angle sensors will be on due to rotation around the x and y axis.
Determining the ultimate product
Combining the seven elements above into a large framework for design exploration, validation and verification is Siemens PLM Software’s answer to the set of challenges that confronts the automotive industry.
To produce autonomous driving cars in large quantities, it is not feasible to add additional resources to the current vehicle development teams and simply enlarge the tool chain with additional software solutions. The requirements for energy efficiency, comfort, drivability and durability will not be reduced. In fact, they might become more difficult with occupants doing things other than driving. Automated driving and connecting to larger networks also factors into this dilemma. Balancing the factors that influence vehicle performance in often conflicting domains is optimally done in an integrated process and toolchain. This is a key for developing shared, autonomous mobility.





{kind=link}