
Banbrytande arkitektur ger felfria banor med ett enda klick
Man ska inte behöva vara civilingenjör för att programmera en robot. I takt med att robotsystemen har utvecklats har även styrprogrammen blivit betydligt mer användarvänliga och idag är den tidsödande punkt-till-punkt programmeringen ett minne blott. Med Robotmasters helt nya plattform är felfri programmering bara ett klick borta.
Marknaden förändras hela tiden och tillverkningsindustrin måste klara av att hålla jämna steg. De traditionella tillverkningsmetoderna har svårt att möta dagens krav på anpassning och produktion i små serier. Det som krävs är en flexibel tillverkningsprocess och här spelar programmeringen av robotar en viktig roll.
– Om du har en produkt som ska tillverkas under flera månader eller ett år så har du råd att spendera två veckor på programmering. Men sådana ledtider fungerar inte om du behöver programmera flera projekt varje dag, säger Garen Cakmak, Senior Director hos Hypertherm Robotic Software som utvecklat Robotmaster.
En ny era inom robotprogrammering
 Under industrirobotarnas tidiga dagar var programmeringsarbetet tidsödande och krävde expertkunskaper inom robotik. Robotens gränssnittsenhet hanterades manuellt, vilket fördröjde produktionen. Så småningom kom verktyg för offline-simulering, men de byggde på samma gamla koncept.
Under industrirobotarnas tidiga dagar var programmeringsarbetet tidsödande och krävde expertkunskaper inom robotik. Robotens gränssnittsenhet hanterades manuellt, vilket fördröjde produktionen. Så småningom kom verktyg för offline-simulering, men de byggde på samma gamla koncept.
Offline-programmen utvecklades och de första CAD-baserade verktygen lanserades. De första programmen var extremt långsamma, men betydligt mer flexibla.
Med den andra generationen kunde man rita en bana, eller kurva, och sedan beräkna den snabbaste vägen från punkt A till punkt B. När dessa funktioner automatiserades gick programmeringen snabbare, men man förlorade en del flexibilitet. I och med övergången till CAD/CAM och point converters gick arbetet ännu snabbare, men fortfarande krävdes specialistkunskaper i robotics och CAD/CAM. De mest använda verktygen för offline-programmering byggde fortfarande på gamla idéer om hur bearbetningen skulle gå till.
Det var dags för en radikal förändring och en helt ny och användarvänlig arkitektur
En integrerad lösning med användaren i fokus
Teamet bakom Robotmaster (som har 20 års erfarenhet av att skapa mjukvara för offline-programmering) satte därför igång med att utveckla ett program som vem som helst kan använda. Målet var att skapa en lösning för snabb och enkel optimering av robotsystemens funktioner, utan att ge avkall på flexibiliteten.
– Vi ville skapa ett helt nytt CAD/CAM-verktyg för programmering av robotsystem. Programmeringen skulle vara intuitiv, automatiserad och funktionsbaserad, säger Cakmak.
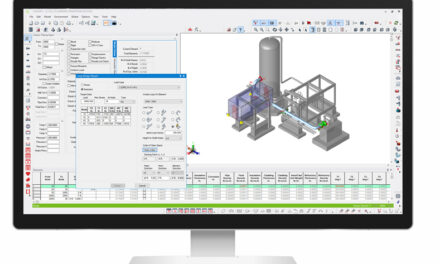
Det användarvänliga gränssnittet hos Robotmaster V7 kommer för alltid att förändra hur vi programmerar robotar.
– Vi förutsätter att användarna har god kännedom om tillverkningsprocessen och att de vet vilka uppgifter som behöver utföras. Med Robotmaster kan de programmera sina robotar utan att vara experter på vare sig CAD/CAM eller robotics, säger Cakmak. Om användaren till exempel anger att en kant ska gradas generar programmet omedelbart en felfri kod för detta.
Programmet analyserar och förprocessar importerade CAD-modeller helt automatiskt. När användaren sedan gjort några enkla inställningar för den aktuella uppgiften gör programmet alla beräkningar som behövs.
 – Med ett klick skapas alla punkter och linjer, och redan där sparar en erfaren CAD/CAM-specialist 5–10 minuters arbete, säger Cakmak. Med ett enda klick skapas hela robotbanan.
– Med ett klick skapas alla punkter och linjer, och redan där sparar en erfaren CAD/CAM-specialist 5–10 minuters arbete, säger Cakmak. Med ett enda klick skapas hela robotbanan.
Med enkla dra-och-klicka-verktyg och förhandsvisningar kan användaren snabbt optimera robotens rörelser. I verktygslådan finns även specifika inställningar för robotfunktioner såsom hastighet och rörelseoptimering samt kraftfulla verktyg för övergångar mellan olika robotrörelser. I det funktionsbaserade gränssnittet kan användaren direkt se hur de olika inställningarna påverkar resultatet.
– Parametrar och problem såsom singulariteter, räckviddsgränser och kollisioner kan kännas främmande för den som inte är utbildad inom robotik. I vårt program hanteras dessa parametrar automatiskt, säger Cakmak
Att utnyttja robotteknikens möjligheter
En av robotteknikens största fördelar är flexibiliteten, dvs. de många möjligheterna. Samtidigt innebär detta en stor utmaning.
I takt med att tillverkningsprocesserna blev mer och mer komplexa behövdes bättre verktyg och slutligen utvecklades de femaxliga systemen, men de lösningarna saknade redundans. Med andra ord var verktyget fortfarande tvunget att ha en viss bestämd orientering under tillverkningen.
Sedan kom robotar och de sexaxliga robotsystemen. För varje given uppgift hade nu robotsystemen en extra frihetsgrad, dvs. totalt minst sex vridaxlar. Från och med nu fanns inga begränsningar vad gäller verktygets orientering. Den flexibiliteten måste man ta tillvara på.
– När vi träffar robottillverkare och integratörer talar de gärna om allt som deras robotar kan utföra, säger Cakmak. Men det som håller dem tillbaka är bristen på användarvänliga program som gör att användaren kan utnyttja all denna flexibilitet utan att vara expert på området, säger Cakmak.
![]() Att ta tillvara på flexibiliteten hos en robot är ingen enkel sak. Förmågan att rotera kring verktyget är en av de viktigaste fördelarna hos en robot. Denna rotation är inte begränsad av den uppgift som ska utföras, vilket för de flesta applikationer innebär att rotationen inte påverkar verktygets orientering i förhållande till arbetsstycket eftersom det finns redundans.
Att ta tillvara på flexibiliteten hos en robot är ingen enkel sak. Förmågan att rotera kring verktyget är en av de viktigaste fördelarna hos en robot. Denna rotation är inte begränsad av den uppgift som ska utföras, vilket för de flesta applikationer innebär att rotationen inte påverkar verktygets orientering i förhållande till arbetsstycket eftersom det finns redundans.
Förutom denna redundans kan en typisk sexaxlig robot i varje programmeringspunkt ställas i åtta möjliga konfigurationer. Dessa konfigurationer orsakar ett annat stort problem vid programmeringen, nämligen singulariteter.
Att hantera singulariteter
En singularitet är ett problem som uppstår när det vid en viss punkt finns flera lösningar för nästa robotrörelse. När en sådan matematisk tvetydighet uppträder kan roboten inte fortsätta sin uppgift.
Singulariteter är en viktig fråga inom robotik eftersom en typisk sexaxlig robot har tre potentiella ”singularitetsområden”: robotens handled, armbåge och bas. Om två leder står i ett parallellt läge uppstår en matematisk tvetydighet. När roboten närmar sig en singularitet uppstår acceleration och en hög hastighet i vissa av robotens leder, vilket försämrar robotbanan betydligt eller får roboten att stanna och ett felmeddelande visas.
När man programmerar en robot måste man ta hänsyn till dessa faktorer och dessutom tänka på applikationen.
– Det känns lite som att ge sig ut i vilda västern, när man tänker på alla tillämpningar vi måste ta hänsyn till. Dagens robotsystem är så mycket mer än bara en svarv eller fräs, säger Cakmak.
 Ju fler uppgifter som ska utföras i varje robotcell, desto större är risken för att man stöter på problem med singulariteter, räckviddsproblem, ledbegränsningar och kollisioner, särskilt i system med flera celler. Utan ett bra program för simulering och optimering är det mycket svårt att undvika dessa problem. Man kan likna detta med att räkna ut den kortaste vägen till en avlägsen plats utan att ha tillgång till elektroniska kartor eller en GPS, det vill säga ett verktyg som utifrån ett fågelperspektiv underlättar optimeringen av uppgiften.
Ju fler uppgifter som ska utföras i varje robotcell, desto större är risken för att man stöter på problem med singulariteter, räckviddsproblem, ledbegränsningar och kollisioner, särskilt i system med flera celler. Utan ett bra program för simulering och optimering är det mycket svårt att undvika dessa problem. Man kan likna detta med att räkna ut den kortaste vägen till en avlägsen plats utan att ha tillgång till elektroniska kartor eller en GPS, det vill säga ett verktyg som utifrån ett fågelperspektiv underlättar optimeringen av uppgiften.
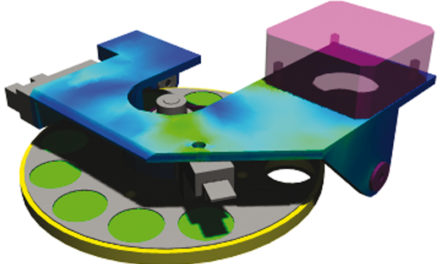
Robotmaster V7 har ett intuitivt grafiskt gränssnitt för styrning av robotens leder i en simulerad miljö, där man ser hur varje robotrörelse påverkar resultatet. Du kan enkelt kontrollera förekomsten av potentiella problem, såsom singulariteter, räckviddsbegränsningar och kollisioner. Det enda du behöver göra för att korrigera en bana är att justera en kurva och undvika de färgmarkerade områdena på skärmen (som representerar fel). Med några klick skapar du enkelt en optimal bana.




{kind=link}